BAB III
PERALATAN DAN PROSEDUR
PELAKSANAAN
3.1 Peralatan
yang Digunakan
Dalam praktikum Ilmu Ukur
Tanah ini peralatan yang digunakan antara lain, theodolit konvensional, theodolit digital, waterpass, statif,
payung, rambu, alat tulis, dan formulir.
3.1.1
Theodolit
Digital
Theodolit terbagi atas tiga bagian, yaitu bagian bawah,
bagian tengah, dan bagian atas. Bagian bawah terdiri dari skrup penyetel yang
menyangga suatu tabung dan plat yang berbentuk lingkaran. Bagian tengah terdiri
dari suatu rambu yang dimasukkan ke dalam tabung, dimana pada bagian bawah
sumbu ini adalah sumbu tegak atau sumbu pertama (S1). Di atas S1
diletakkan lagi plat yang berbentuk lingkaran yang berjari-jari lebih kecil
daripada jari-jari plat bagian bawah. Pada dua tempat di tepi lingkaran dibuat
alat pembaca yang disebut nonius (N0).
Suatu nivo diletakkan pada atas plat nonius untuk membuat sumbu tegak lurus.
Bagian atas terdiri dari sumbu mendatar atau sumbu kedua (S2), pada
S2 diletakkan plat berbentuk lingkaran dan dilengkapi skala untuk
pembacaan skala lingkaran. Pada lingkaran tegak ini di tempatkan kedua nonius pada penyangga S2.
Dari uraian di atas dapat disimpulkan ada dua
perbedaan antara lingkaran mendatar dengan lingkaran vertikal. Untuk skala
mendatar titik harus ikut berputar bila teropong diputar pada S1 dan
lingkaran berguna untuk membaca skala sudut mendatar. Sedangkan lingkaran
berskala vertikal baru akan berputar bila teropong diputar terhadap S2.
Pembacaan ini digunakan untuk mengetahui sudut miring.
Cara
penggunaan theodolit digital :
1.
Cara seting
optis
a.
Alat
diletakkan di atas patok, paku payung terlihat pada lensa teropong untuk centering optis.
b.
Pengunci kaki
statif dikendurkan, kaki statif ditancapkan ke tanah dan dikunci atau di
kencangkan lagi.
c.
Gelembung
nivo diatur berada tepat pada tengah lingkaran.
d.
Mengatur
salah satu nivo tabung dengan mengatur sekrup pengatur nivo.
e.
Mengatur nivo
tabung yang lain.
f.
Mengatur nivo
teropong dengan sekrup pengatur nivo teropong.
2. Cara penggunaan alat
a.
Memasukkan
baterai ke dalam tempatnya kemudian melakukan centering optis ke atas.
b.
Menghidupkan display dan atur sesuai keperluan.
c.
Untuk membaca
sudut mendatar, arahkan teropong pada titik yang dikehendaki kemudian membaca
pada display.
d.
Untuk membaca
sudut vertikal, teropong diarahkan secara vertikal dan kemudian dibaca pada display.

Gambar 3.1 Theodolit Digital
Keterangan gambar theodolit digital ( DT 20 ES ) :
1.
Nivo kotak
2.
Klem pengunci
3.
Penggerak
halus
4.
Tempat battery
5.
Klem pengunci
lingkaran horisontal
6.
Penggerak
halus lingkaran horisontal
7.
Klem pengatur
nivo tabung
8.
Handle / pembawa
9.
Lensa okuler
10.
Klem pengatur
fokus benang
11.
Tombol ON /
OFF
12.
Nivo tabung
13.
Display
14.
Keyboard ( papan tombol )
15.
Plat dasar
3.1.2 Theodolit
0 (T0)
Pada dasarnya alat theodolit konvensional sama dengan theodolit digital, hanya pada alat ini
pembacaan sudut azimuth dan sudut zenith dilakukan secara manual. Theodolit 0 (T0) dibagi menjadi tiga bagian, yaitu bagian atas, bagian tengah, dan
bagian bawah. Bagian bawah terdiri atas sumbu yang dimasukkan ke dalam tabung,
di atasnya terdapat alat pembaca nonius.
Di tepi lingkaran terdapat alat pembaca nonius.
Bagian atas terdiri dari bagian mendatar. Di atasnya terdapat teropong
dilengkapi dengan sekrup-sekrup pengatur fokus dan garis-garis bidik diagfragma.
Cara penggunaan theodolit 0 (T0) :
1. Alat dipasang
di atas patok. Untuk mengetahui as pesawat tepat di atas patok atau belum,
digunakan pendulum dan diusahakan ketelitiannya 3 mm. Jika alat belum tepat di
atas patok, maka perlu digeser sehingga pendulum tepat berada di atas patok.
2. Sebelum
digunakan alat diatur sedemikian rupa sehingga alat berada dalam posisi
mendatar. Pengaturan dilakukan dengan bantuan sekrup pengatur instrumen dan
nivo kotak. Setelah dilakukan pengaturan dengan tepat, alat dapat digunakan.

Gambar 3.2 Theodolit Konvensional (TO)
Keterangan
gambar theodolit 0 (T0) :
1.
Plat dinding
pelindung lingkaran vertikal di dalamnya
2.
Ring pengatur
lensa tengah
3.
Pengatur fokus
benang silang
4.
Alat baca
lingkaran vertikal/horisontal
5.
Lensa obyektif
6.
Klem vertikal
teropong
7.
Penggerak
halus teropong
8.
Klem alhidade horisontal
9.
Penggerak halus
horisontal
10.
Nivo kotak alhidade horisontal
11.
Plat dasar
instrumen
12.
Nivo tabung alhidade horisontal
3.1.3
Waterpass
Waterpass digunakan untuk
mengukur beda tinggi suatu titik di atas permukaan bumi. Bagian-bagiannya
antara lain :
a.
lensa
teropong
b.
cermin
c.
nivo
d.
alat
penggerak halus
Waterpass terdiri atas dua lensa, yaitu lensa obyektif dan
lensa okuler. Di samping itu terdapat lensa pembalik yang membuat jalannya
sinar dari obyek ke pengamat lurus. Fungsi cermin dipakai untuk mengawasi nivo
oleh pengamat sambil mengarahkan teropong ke obyek yang dituju.
Untuk mengontrol posisi pesawat apakah sudah datar
atau belum digunakan nivo. Sedangkan untuk mengatur teropong sehingga pembacaan
titik menjadi jelas digunakan alat penggerak halus.
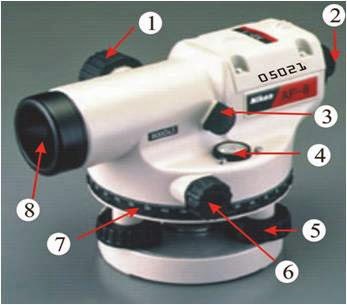
Gambar 3.3 Waterpass
Keterangan gambar waterpass :
1. Sekrup penggerak lensa teropong 5. Sekrup
penyetel
2. Lensa okuler 6.
Klem pengunci
3. Cermin pemantul bidang nivo tabung 7. Penyetel arah sudut
4. Nivo tabung 8.
Lensa obyektif
3.1.3 Rambu

Gambar 3.4 Rambu ukur
Bentuk
rambu mirip dengan mistar kayu yang besar, dilengkapi dengan skala pembacaan
tiap satu sentimeter dan skala besarnya merupakan huruf E. Panjang rambu adalah
tiga meter. Bahan rambu ada yang dari kayu maupun alumunium. Rambu berguna
untuk membantu theodolit dalam
menentukan jarak secara optis. Hal yang perlu diperhatikan adalah dalam
memegang rambu harus tegak lurus terhadap titik yang ditinjau.
3.1.5 Patok
Kayu

Gambar 3.5 Patok kayu
Patok
kayu dibuat dari reng ¾ atau bujur sangkar dan panjangnya ± 90 centimeter yang salah satu ujungnya diruncingkan dan di ujung lainnya
di beri paku payung agar pembacaan nonius
lebih akurat.
3.1.6 Payung

Gambar 3.6 Payung
Payung
digunakan untuk melindungi theodolit dari
sinar matahari dan hujan. Sebaiknya payung tersebut bukan terbuat dari bahan
logam.
3.1.7 Pendulum

Gambar 3.7 Pendulum
Alat
ini digunakan untuk membantu dalam meletakkan alat dalam kondisi tegak lurus
terhadap titik yang ditinjau. Karena salah satu syarat utama dalam pengukuran
sudut adalah sumbu vertikal harus tegak lurus sumbu horisontal. Untuk peralatan
modern pendulum diganti dengan cara optis dengan bantuan teropong.
3.1.8 Roll Meter

Gambar 3.8 Roll meter
Alat ini
digunakan untuk mengukur jarak antar titik dan juga untuk mengukur tinggi alat.
Roll Meter yang dipergunakan ini mempunyai panjang 50 m.
3.1 Prosedur Pelaksanaan
3.2.1 Pengukuran Poligon sebagai Kerangka Peta
Untuk
membuat peta situasi cukup menggunakan titik pasti yang telah diketahui dari
jaring triangulasi. Jika titik pasti
terlalu jauh, maka dapat diperbanyak dengan poligon mengikat ke muka atau ke
belakang.
a. Penentuan Titik Poligon
Dalam penentuan titik-titik poligon dimulai dari
titik-titik pasti yang telah diketahui koordinatnya, titik pasti ditandai
dengan adanya patok beton dengan jarak yang paling dekat. Apabila tidak ada
titik pasti maka titik lain ditentukan dengan kriteria :
1. Jarak antara
titik pasti tidak terlalu dekat atau tidak terlalu jauh sehingga jika dilakukan
pendetailan di seluruh lokasi dapat digambar.
2.
Antara titik
yang satu dengan yang lainnya dapat saling terlihat.
3.
Jumlah titik
tidak terlalu banyak agar mengurangi kesalahan.
b.
Pengukuran
Sudut Horisontal
Alat yang digunakan adalah theodolit, sebelum digunakan kunci magnet dibuka dan setelah nonius diam baru ditutup. Pada pembacaan
sudut horisontal dilihat dari nonius I
yang bisa langsung dikontrol pada nonius
II dengan selisih 180o. Pada pelaksanaan hanya nonius I yang dibaca atau diadakan dua kali pembacaan kemudian
dirata-rata. Sudut dalam (b) adalah belakang-muka.
Pembacaan sudut dengan mengatur skala/magnet agar
strip-strip skala sudut membentuk garis lurus. Pembacaan nonius I dari kiri bawah ke kanan atas dengan selisih 180o
dengan satu strip mewakili 1o.
c. Pengukuran Jarak Secara Optis
Pada pengukuran secara optis digunakan theodolit dan rambu. Caranya rambu
didirikan secara tegak lurus lalu dibidik dengan pesawat DT 20 ES. Setelah
besaran yang dibidik terlihat tajam, dicatat benang atas, benang bawah, dan
benang tengah. Setelah itu jarak mendatar dihitung dengan cara sebagai berikut
D‘ = 100 (BA – BB) sin z
D = D’ sin z
= 100 (BA – BB) sin² z
Δh = D’ sin m
= 100 (BA-BB) sin z . sin m
= 100 (BA-BB) cos m . sin m
= ½ . 100 (BA-BB) sin 2 m
ΔH = Δh + i – BT
Hb = Ha + ∆H
keterangan : D = jarak mendatar
D’ = jarak optis
BA = benang atas
BT = benang tengah
BB = benang bawah
m = sudut miring
z = sudut zenith
i =
tinggi alat
Δh = beda tinggi T0 ke BT rambu
ΔH = beda tinggi elevasi A dan B
Ha = elevasi A
Hb = elevasi B
Pembacaan
zenith dapat dibaca pada teropong zenith, cara membacanya adalah dimulai
dari angka kiri atas ke angka yang sama dengan jarak terdekat pada kanan bawah.
Satu grid mewakili 10 menit.
3.2.2 Pengukuran Kerangka Vertikal
Pada praktikum Ilmu Ukur Tanah ini pengukuran beda
tinggi dilakukan dengan cara:
a. Trigonometri
Beda
tinggi antara dua titik diperoleh setelah dilakukan pengukuran jarak mendatar,
sudut helling, tinggi alat, dan
benang tengah. Cara trigonometris
dipengaruhi oleh suatu kelembaban sehingga menyababkan cahaya dari titik A ke B
mengalami refleksi.
b. Dengan
Pengukuran Sipat Datar
Alat yang
digunakan adalah waterpass, rambu,
dan payung. Alat didirikan di tengah-tengah antara titik A dan B dan rambu
didirikan di masing-masing titik. Kemudian alat dibidik ke muka dan ke belakang
kemudian dicatat bacaan masing-masing benang. Setelah itu dilakukan cara yang
sama dengan mengganti ketinggian alat.
3.1.3
Pengukuran Titik Detail
a. Cara Pengukuran
Pengukuran
titik detail dilakukan dengan cara memancar, yaitu pada tiap titik pesawat ditembakkan
ke arah kelipatan 45o. Pada tiap garis diambil beberapa titik untuk
penggambaran peta.
b. Data yang Diukur
Data yang
harus diukur antara lain adalah jarak tiap titik detail dengan titik poligon
tempat alat didirikan, ketinggian alat, dan sketsa lokasi pengambilan titik
detail.
c.
Pengukuran Beda Tinggi dengan Waterpass
Pengukuran beda tinggi dilakukan dengan cara
mendirikan alat pada titik poligon dan mengarahkan ke titik poligon yang
lainnya. Pembacaan dilakukan dua kali dengan mengubah ketinggian alat dan
dilakukan pengukuran pergi dan pengukuran pulang.



